
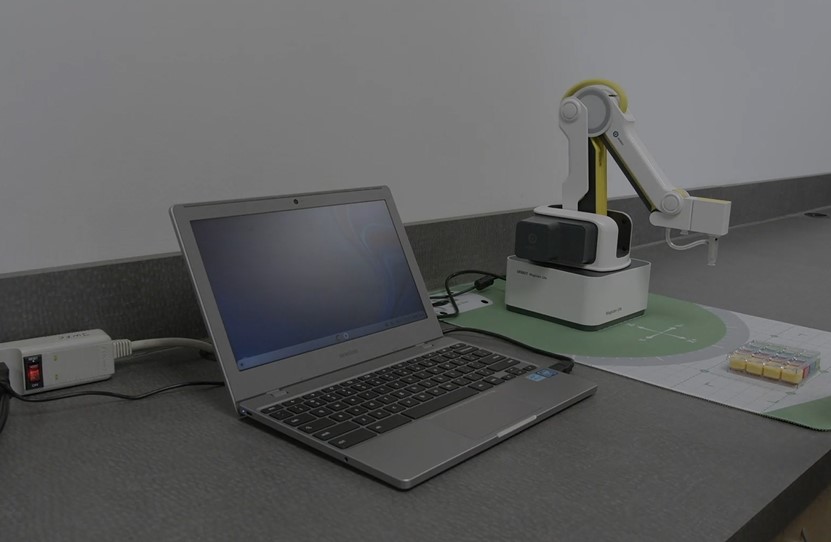



My First Robotic Arm Project
Dobot Pick and Place in Plain English
Below is a simple version of the programming code you will complete in the Dobot Pick and Place activity. It is in plain English so you can understand the steps you will program before it is implemented in a specific programming language. You can use it as a guide if you get lost during the activity.
Designed to be read by a human and not a computer.
- Move to Safe/Starting Position
- Move to Above Pick
- Move to Pick
- Turn Suction Cup On
- Move to Above Pick
- Move to Above Place
- Move to Place
- Turn Suction Cup Off
- Move to Above Place
- Move to Safe/Ending Position
Tutorial Videos
Setting Dobot on the Mat
Connecting the Cables
Connecting the Chromebook
Starting the Software
Powering on the Dobot
Homing the Dobot
Connect the Dobot to Software
Control the Dobot (Joints)
Control the Dobot (Axes)
The Dobot Mat
First Activity (Joint Control)